11月8日の日経産業新聞にファナックの稲葉社長へのインタビュー記事があった。新しいロボットのアプリケーションとして「ワーク(加工物)の自動供給などで工作機械を24時間稼動するシステム」をアッピールしていた。「(知能化した機能によって)ロボットを使ったことにない顧客に、搬送装置などの周辺機械がなくても導入可能。日本で稼働中のNC工作機械は50万ー60万台あり、各機械に一台ずつロボットを組み込めば膨大な市場になる。もっとも力を入れるべき分野だ」というわけだ。
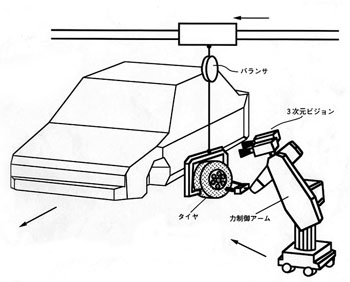
ここでの「知能化した機能」とは「通い箱中に適当に並べられたワークを、3次元視覚装置でその位置と姿勢を認識して正しく掴む」機能とか、「ワークを工作機械へ装着する際に必要なロボットアームの力制御またはコンプライアンス制御などができる」とか言うものであろう。
筆者の興味は、特に力制御またはコンプライアンス制御がどの程度の性能に仕上がっているのかということである。自動車部品組み立てラインでの組立作業のようなのような速い作速度を要求される用途で使えるレベルに仕上がっているのだろうか?
2006年11月アーカイブ
トヨタ自動車がロボット開発部をつくり、色々な用途のロボットの試作を始めていることが新聞などで報道されている。2006年1月4日の日経産業新聞によれば、その開発戦略は「人のそばにいて助けてくれる知能機械、パートナーロボット」の開発であり、また「道具を使えるロボット」の開発といわれる。
ここで「道具を使えるロボット」というのはなかなか重要なことを言っていると思う。人間は道具を使う動物であり、それによって今日の繁栄を獲得してきた。ロボットが道具を使えれば、例えば重くて大きな物体を扱う場合、今までのように人間が接近するのが危険な大型のロボットを使う必要は無くなる。今まで人間が扱ってきたクレーンやバランサーなどの道具をロボットが使えれば、ロボット自身は人間のように小型で非力なもので十分ということになる。小型で非力なロボットならば、人間のそばにいても怖くは無いわけである。怖くなくて安全ならばもっとロボットを使おうという場面が増えてくるだろう。しかし、普通に考えるとこれは中々難しそうだ。どのようなアイディアを見せてくれるだろうか楽しみである。