ドイツのスタートアップ企業のKBee社が7軸の協働ロボットを発表した。特徴はKUKA社の7軸協働ロボットiiWaに似ているが、価格が120万円と安く、iiWaの約1/8であることだ。iiWaは特に価格が高かったので、FRANKA EMIKAの低価格は驚きである。
どのようにして低価格化したのか? 一つには、iiWaを参考にしているため開発費が安く済んだことが大きいだろう。FRANKA EMIKAはiiWaの原型であるLWR(Light Weight Robot)を開発したDLR(German Aerospace Center)の出身のメンバーが創業した会社である。
二つには各ジョイントがモジュール化(モータ、減速機、エンコーダ、トルクセンサが一体化)され、組み立ての80%がロボットでできるようにしたこと。
今一つは、インクレメンタルエンコーダを使っているのではないか? ビデオの中で、ゼロイングのような動作が見られる。Universal Robots社も最初はインクレメンタルエンコーダで発売し、後にアブソリュートエンコーダに変更した例もある。 その他、動作指示はすべてノートパソコンから行い、ティーチング・ペンダントを使わないことで価格を下げている。
| Franka EmikaとKUKA iiWaとの性能比較 | ||||
|
|
単位 |
FRANKA EMIKA |
KUKA iiWa |
|
|
ロボット質量 |
kg |
15.8 |
22 |
|
|
可搬質量 |
kg |
3 |
7 |
|
|
自由度 |
軸数 |
7 |
7 |
|
|
リーチ |
mm |
800 |
800 |
|
|
位置再現精度 |
±mm |
0.1 |
0.1 |
|
|
最高速度 |
m/sec |
2.5 |
1 |
|
ユニークな プログラミング方法
最大の特徴は、スマートフォン世代に使いやすそうな、「アプリケーション(単位作業)を表すアイコンを並べて仕事をプログラム(構成)する」やりかたであろう。下図に於いて、アプリケーションのアイコン群が画面下にまとめられていて、作業構成に必要なアプリケーションのアイコンを指でドラッグして上部のプログラムライン上にドロップする(ビデオ1参照)。作業の意図が一目瞭然なので作りやすく、かつ理解しやすいと思われる。アプリケーションはクラウドに蓄積されていて、ダウンロードして使う。
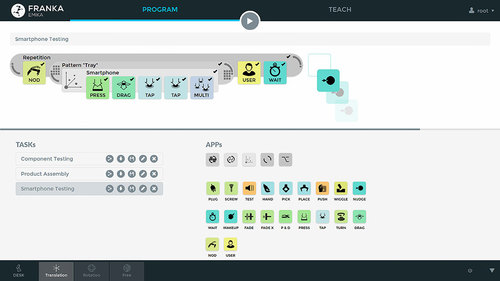
アプリケーションのアイコンを並べ終わったら、今度はロボットアームを手で案内しながら、一連の作業を実際にやって見せる(demonstrate)。 この時、必要ならば個々の作業を代表するアプリケーションのアイコンを開いて、詳細を設定してゆく(一連の作業の説明サイト、ビデオ1、ビデオ2も参照)。これですべてのティーチング作業が終了するとのことである(追記2018.07.09参照)。確かに直感的で、ティーチングしやすいと思われる。
一つのアプリケーションのアイコンがどのくらいの作業を含んでいるかを観られるビデオがあったので、ここに参照しておく。一つのアプリケーションのアイコンから数ステップの動作が作られている。アプリケーションは位置データなどが入っていないプログラムであり、demonstrationまたはtrainのフェーズで実データを入れてゆく。
開発者が主張している「従来のロボットには無かった新しい機能」として、別のプログラムで作られたアプリケーションが新しいプログラムで使える点である。このようなアプリはクラウドからダウンロードして使う。
ロボットのiPhone化を目指しているとのこと。
人との協働を実現するために、ロボットには何が求められるのか。「理想的なロボットは、『iPhone』のように誰もが直感的に使えて、誰もがプログラミングできるもの」――。そう語るのは、開発関係者のドイツのハノーバー大学自動制御研究所所長であるSami Haddadin氏だ。
これからのロボット・プログラミングで、代表的な一つモデルになると思われる。具体的には次回に、ユニバーサルロボット社やRethink Robotics社の同様な試みと比較して考察する。
追記2018.07.09
Franka Emikaの動作のプログラミング方法はユニークで2017年度のGerman Innovation Awardを受賞している。受賞内容の記述の中から自己学習型(Learn by watching)プログラミングに関する説明を下記に引用(英文)する。
The system is extremely easy to operate and requires no previous programming knowledge since the robots learn by 'watching'. One only need demonstrate the activities the robot is to perform. The machine learns the activity and can also use the acquired knowledge for other challenges -- a skill conventional industrial robots do not have. To make programming as simple as possible, the nominees have also developed an innovative programming and operating concept. With it, tasks and sequences of motion can be broken down visually into small program modules, so-called robot apps. They make using robots as easy as using a smart phone -- and opens up a wide range of new potential applications from which even small and medium-sized businesses stand to profit.
