ユニメートロボットの成功に刺激されたのか、当時、工作機械の世界トップメーカであったシンシナチミラクロン社(米国)は1973年にT3(T3はThe Tomorrow Toolのアクロニム、開発者はRichard Hohn)というロボットを開発、発表した。コンピュータ(16ビットのミニコンピュータ)で制御された最初の市販ロボットではないかと思う(注1)。油圧駆動ということを除けば、現在のロボットと同程度の機能を持つものであった。ユニメートとは異なり、実世界の直交座標系で移動命令(直線移動制御、姿勢制御、移動物体追尾制御)を出すことができた。 GMMD(GMの生産技術研究所)はこのロボットとレンジファインダーという物体形状計測システムとを組み合わせて、Consightというコンベアトラッキングシステムを開発した(研究用)。コンベア上をランダムな姿勢で流れてくる複数種類部品の形状、位置、姿勢をレンジファインダーが計測、識別し、ロボットがその結果に基づいて部品を掴み、種類別にパレットに整列することができた。同様なシステムは現在では一般的に使われるようになったが、当時ではコンピュータ制御された産業用ロボットの大きな可能性を生産技術者に印象付けた。

写真:GMのConsightロボットシステム(参照:Proceedings og 9th ISIR,1979,195)
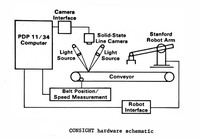
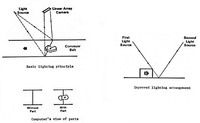
写真:Consightのレンジファインダーの原理
注1:16ビットミニコンピュータ(浮動小数点演算ハートウェア付き)が使えるようになったため、サーボ系に滑らかな速度指令を出すことができた。初期のユニメートのような特殊なサーボシステムは不要になり、滑らかで高位置精度な動きが実現できるようになった。
参考:ユニメートはコンピュータを持たなかったため、直交座標系での移動命令はできなかった。関節座標系(関節回転角度など)でロボットの位置姿勢が記憶され、移動命令は目標関節角度で与えられる。始点から終点(目標位置)までの各軸ごとの角度偏差に比例した目標速度が各関節サーボに与えられるので、各軸サーボの移動は同時にスタートし、ほぼ同時に目標値に到達する。したがって移動中の軌跡はほぼ直線的となる。

コメントする