1977年にGMの生産技術研究所(GMMD:General Motors Manufacturing Development)は自動車部品の組み立ての自動化に使うロボットの開発を公募した。その仕様はPUMA(Programmable Universal Machine for Assembly)としてまとめられていた。Unimation社はStanford大学計算機科学部研究員のVictor Sheinman(VicArm Incを作ってVicArmを研究用として販売していた)を雇って、Unimation West社で開発に当たらせ、Unimationの本社でGM向けに製造した。
PUMAの仕様とは、
1)関節型のロボットである。
2)人間の腕と等価(同じサイズ)である。
3)人間との混在が可能である。
(人間と触れても危険性が少ない低出力機を目指していたが、実際には最大可搬加重2.5Kgを持って最高速度1m/secで作業者に衝突すれば、作業者を殺傷するパワーを持っていた。この仕様は、達成されなかった。作業の高速化と衝突安全性は両立していない。ロボットは安全柵内部で運転されている。)
4)段階的合理化が可能である。
5)ロボット故障時は人間でバックアップできる。
注1:IRON AGE,Nov.28,1977. ONE BIG STEP FOR "ASSEMBLY IN THE SKY"

写真:Unimationから発売当初のPUMA(5軸型)(参照:ROBOTS IN INDUSTRY Vol.5,No.3 Fall 1978)、VicArmがその原型となっている。コントローラの上にアームが設置され、両者が一体化されている。ロボット故障時にコントローラも含めて交換される。交換された機械にプログラムとデータを入れ替えれば直ちに利用可能な状態になる「ロボットの互換性」が追及された。
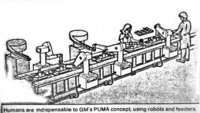
図:PUMAの使われ方の概念図(GMの仕様)(参照:IronAge November 28,1977,One Big Step for "Assembly in the Sky")。ロボットアームとコントローラが一体化されている。
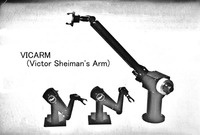
写真:Stanford大学コンピュータサイエンス学科のVictor Sheiman氏が人工知能研究用に設計した電動型ロボットアームVicArm。PUMAのベースになった。

コメントする