GMやFordなどの自動車メーカはスポット溶接や塗装作業の次のロボットの応用分野として、機械組み立て分野を考えていた。この分野のロボット化の困難さは後ほど思い知らされるわけだが、自動車製造工場の中での組み立て作業に従事する作業員の数は最も多く、ロボットによる自動化の効果は大きいように予想できた。また、多くの大学(例:Stanford大学)や研究機関(MIT,Chaies Stark Labs )でロボットによる機械部品組み立ての研究がなされていた。
Unimation社(Unimateの製造会社)は、1979年代後半にFord Motorと共同でトルコンのサブアッセンブリーであるC-6ガバナー(部品数は12~15)の組み立て研究に取り組んだ。この研究で彼らは組み立てロボットに要求される最重要の性能は組み立て速度だという結論に達した。そこで、Unimation社はミニコンピュータで制御される6軸油圧サーボ型組み立て用ロボットを開発し、サーボのバンド幅は50Hzでツール端の加減速度は±2G,位置再現性は±0.1mmの高性能を実現した。私もこのロボットの実物をUnimation社で見たことがあるが、ロボットの後部がカバーされていて、動物の「アルマジロ」のような格好をしていたのが印象に残っている。

写真:機械組み立て用に開発されたUnimation 6000の2台が協調してC-5ガバナーを組み立てている。実際に商品化・販売されることは無かった。(参照:Machine and production engineering. 22.March 1978,Much to leran about robot)
2台でC-5ガバナーを組み付けた結果は、組み立て所要時間が作業者の場合(一人)が46秒であるのに対し、31秒であった。このロボットは結局、実用化されなかったが、その理由はUnimation6000の価格が高すぎたためと思われる。作業者がガバナーを組み立てる場合の費用に対して、2台のUnimate6000がガバナーを組み立てる費用が高すぎ、また将来的に価格が下がらないとの判断があったのだろう。これ以降Unimation社は、ロボットの低価格化を目指して小型軽量の電動型ロボットの開発に方向転換する。
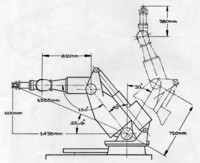
写真:Unimate6000の構造

コメントする