産業用ロボットのもう一つの進化のベクトルである、"ソフトウェアの進化"について触れよう。
一般に産業用ロボットは単体では仕事はできず、例えば組み立て作業では部品供給装置、部品固定治具、部品排出装置、ハンドツールなどを動かすアクチュエータ類、スイッチ類、センサ類、PLCなどのFA機器が必要になる。ロボットとこれら機器が協調して初めて仕事ができる。
ここで必要になるのは、ロボットやFA機器をネットワークで繋いで、必要なアプリケーションを実行してくれる統合システムであり、アプリケーションはパソコンの中に用意する。
ここで、アプリケーションとは、例えばロボットやFA機器への動作指令、生産管理、工程管理、稼働監視、不具合解析・回復などのプログラムである。
ロボットセルやラインなどを立ち上げる際には、下図の左のようにいろいろなアプリケーションに必要なFA機器との通信ソフトウェアを書く必要があるが、それぞれの機器の通信仕様がメーカなどによってまちまちで、従来はこれらの通信ソフトウェアを用意するのが負担でり、エラーの原因となることが多かった。そこで、これを下図の右のように統一するために、ロボットミドルウェアが日本ロボット工業会によって検討、開発されてきた。
ミドルウェアの役割は、ロボット、センサー、PLCなどのFA機器に対して、機器のメーカや機種によらず統一的なアクセス手段とデータ表現方法を、パソコンのアプリケーションソフトに提供する通信インターフェースである。
約15年ほど前から、このようなロボットシステムの統一的なインターフェースORiN(Open Robot/Resource interface for the Network)がミドルウェアとして検討、開発されていることは、当Webサイトでも2006年6月23日に記載してある。ここ15年ほどの間に仕様検討やインプリメンテーションが行われ、さらに実ラインでの検証・改良が行われてきた。その結果、2011年12月にはISO規格として登録された。
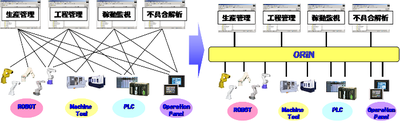
ORiN協議会のORiNのWebサイトから引用
現在は、デンソーウェーブ社のロボットコントローラRC-8に同梱されて発売(2011年)され、いろいろな用途で利用されている。生産工場以外の場所でも多岐に利用されている(注1)。いろいろなモジュールソフトウェア(生産管理などの汎用アプリケーション・ソフトウェア、個々の機器接続のためのプロバイダー・ソフトウェア)の開発、登録が進み、利用可能になったことから、これらの使い廻し(再利用)により、現場スタッフの作業工数が従来の自動化に対して大幅に低下した(下図)。ORiNによってソフトウェアの蓄積、再利用ができるようになったことは、産業用ロボットの進化の中でも大きな事件と言えるのではないか。
代表的なロボット利用の製造ライン(注2)では、アプリケーション5種類、ネットワーク5種類、ロボット54台、PC9台、PLC69台、操作盤22台、状態量のサンプリングアイテムが7500ほどにもなり、ORiNのようなロボットソフトウェアシステムの開発によって、はじめて安定した運用が可能になったとのことである。ORiNはオープンソースであるから、今後も多くの利用者が(スマホのアプリのように)有用なアプリケーションソフトウェアやプロバイダソフトウェアを追加することで、ロボットの能力がどんどん増してゆくことが期待できる。
(注1)ORiNを基盤とするスマートサイバー治療室の開発(東京女子医科大学 岡本 淳 氏)
(注2)デンソーにおけるORiN活用例(2003年7月31日、ORiNミーティング2003 )
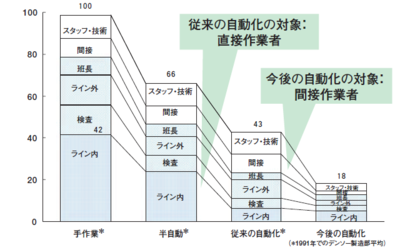 デンソーテクニカルレビュー Vol.10 No.1 2005 から引用
デンソーテクニカルレビュー Vol.10 No.1 2005 から引用
ORiN2は2014年現在で1500ライセンス、9000システムが出荷されている。 最近、注目されているIoT(Internet of Things)にも容易に適用できるシステムとして、今後の展開に期待が持てる。

コメントする