産業用ロボットの開発の方向についても、ファナックと安川電機は考えが異なるようだ(朝日新聞2005年12月9日)。安川電機はトヨタ自動車との共同研究で、双腕ロボットの開発を進めている。

双腕ロボット(安川電機2005年)
安川電機のサイト(http://www.yaskawa.co.jp/newsrelease/2005/15.htm)から引用
両腕(各6軸)を装着する胴体に回転1軸を追加する(計13軸)ことで、両手協調による組立作業をやりやすくする。そのために、アームの関節の形態と配分を従来型の産業用ロボットの形態から変えた。手先の水平移動がやり易い構造になった。一方、ファナックは数年前までは双腕ロボットを従来型ロボットアーム2本で構成して機械組み立てをやらせていたが、「システムに柔軟性がなく、制約が多いことがわかって開発を卒業した」とのこと。

双腕ロボット(ファナック2000年)
力センサ、視覚センサなどで、対象物の状態を観察しながら、目的の仕事を完遂する。
http://www.fanuc.co.jp/ja/product/robot/pdf/intelligentrobot.pdfから引用)
視覚センサ(目)や力覚センサ(手)を駆使して、自律的に作業を完遂できる知能化ロボットの開発に重点をおいている。
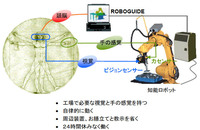
知能ロボットの仕様(ファナック、産業用)
(http://www.fanuc.co.jp/ja/product/robot/pdf/intelligentrobot.pdf から引用)

コメントする