機械部品の組み立て作業の殆どは部品同士の接触状態を作ってゆく作業である。したがって高速かつ安定に接触状態を作れるアームがあれば組立作業に有用のはずである。専用の治具やツールに頼らずに組立てができる可能性がある。
それがなかなか実現しないのは高速かつ安定に接触状態を作るのが難しいことが一つの原因になっている。高速安定接触を目指して開発されているのが関節トルクフィードバック型のアームである(アームの手先に力センサを装着する方式では高速安定接触は期待できない)。ここ10数年の研究例には米国Robotics Research社の7軸ロボット、German Aerospace Centerの6軸ロボット、豊田中央研究所の高速組み立て用6軸ロボット、米国スタンフォード大学のMacro-Mini Actuationアームなどがある。それぞれ高速接触時の安定性の実現に成功している。

写真:"Dexterous Manipulators" by Robotics Research社、1991IEEE International Conference on Robotics and Automationで配布されたVideo Proceedingsから引用
米国RoboticsResearch社はNASAとの関連がある開発会社であり、いまでも研究開発を続けているようだ。このロボットの用途の一つは宇宙空間での機械装置の組み立てであろう。
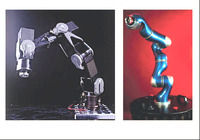
写真:"DLR light-weight robot" by German Aeropspace Center、IEEE Robotics and Automation Magazine ,June 2004,pp.12-21から引用
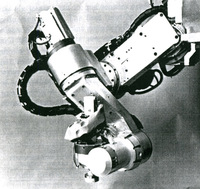
写真:(株)豊田中央研究所の"Fast Assembly Robot Arm"(6軸)、Proc. of the IEEE International Conference on Robotics and Automation 1995 ,pp.2230-2235 から引用
参考:コンプライアンス制御型高速組立ロボットの開発、第12回ロボット学術講演会(平成6年11月20日、21日、22日)、前刷り p.1099-10100
関節トルクフィードバック型のアームは構造的には現状の産業用ロボットより複雑・高価になることもあって、日本のロボットメーカは開発をしていない。しかし、いつまでも現状の位置制御型ロボットのままでは将来は切り開かれない。関節トルクフィードバック方式でしっかりした商品造りをして機械部品組立てなどで広い適用分野を切り開く必要がある。そのためにはきめ細かい構造設計と改良を引き続き積み重ねる必要がある。

コメントする