「産業用ロボットがやる仕事は人間に近づくが、姿形は逆に遠ざかる」というファナック社長の見解について考察してみよう。よく考えると、この見解は矛盾があるような気がする。「やる仕事が人間に近づくならば、姿形も人間に似てくる」と考えるほうが無理がないと思う。仕事のやり方が人と違うならば、姿形も人とは異なるものになるというのが正しいのではないか?この例としては、電子部品挿入機(マウンター)がある。当初は人手でプリント版の穴にICの足をはめ込んでいたが、それを機械化したものであるが、人より何百倍も早くはめ込むことができるようになった電子部品挿入機の形は人の手とはまったく異なるものだ。仕事の仕方を人のやり方とまったく違うものにしたから、姿形も人とはまったく違うものになっている。取り付ける部品の形状も機械が仕事をしやすいように設計変更されたから高能率な機械化が可能になった。
自動車や自動車部品は人が組み立てることを前提にして設計されている。それを自動化しようとすると人と同じような姿形をもったロボットがほしくなる。自動車部品の組み立てや自動車の最終組み立ては自動化が遅れており、人がほとんどを組み立てているのが現状である。
自動車の革新的な設計変更が近い将来に実現できるとは思えないので、しばらくは人間と同じような組み付け方法(たとえば、双腕ロボット)で少しずつ自動化が進むのではないか?しかし、このような方法では、組み立てコストがどうしても高くなって、人間の作業者との競争では勝ち目がないのかもしれない。自動車の設計を革新して、効率のよい組み立て機械が開発されるのが最終的な形ではないか?そのときの受動組み立て機械は人間の姿形と相当異なるものになっていると思われる。
自動車が電子部品挿入機のような組み立て機械で、低価格、高速で組みつけられるのはいつのことだろうかと考えると、その時期は見当もつかない。一方、そのように組み立てられるようになると、自動車の価格は暴落し、自動車産業はうまみのない産業になるのかもしれない。
2005年12月アーカイブ
安川電機が発表した双腕ロボットの形態は、トヨタ自動車と安川電機が共同して開発し、自動車製造ラインに数十台導入したといわれる双腕ロボットの形態と異なる。前者は垂直多関節型の単碗アームを回転する胴体に二本装着した形(下図)であるのに対し、

安川電機が発表した双腕ロボット(2005年12月)
安川電機のサイト(http://www.yaskawa.co.jp/newsrelease/2005/15.htm)から引用
後者は回転または水平移動する胴体に上下軸がスライドする水平多関接型単碗アームを二本装着した形(下図)となっている。

トヨタ自動車と安川電機が共同開発した双腕ロボット(2005年1月)
トヨタ自動車の組立工場などで導入が始まっているとのこと
(参照:http://www.nikkei.co.jp/news/sangyo/20050106AT1D0508H05012005.html、
現在は削除されている)

トヨタ自動車工場で数十台が作業する双腕ロボット
(参照:http://pc.watch.impress.co.jp/docs/2005/1205/kyokai41.htm)
これからトヨタ自動車が製造ラインに多数導入してゆくとされる双腕アームはどちらの形態になるのだろうか?後者の双腕ロボットの導入経験に基づいて前者の形態に変更されたのか?このあたりの事情は不明である。
ファナックの稲葉善治社長が日本産業経済新聞(2005年12月9日)で、「産業用ロボットがやる仕事は人間に近づくが、姿形は逆に遠ざかる」と述べているが、上記の双腕ロボットの形態の変化は、これと逆である。製造コストを下げるためにこのような形になったのか?まだまだ、今後変化してゆくのかもしれない。
産業用ロボットの開発でブレークスルーを作るために、いろいろなアプローチがなされてきた。それがはからずも安川電機とファナックという2大ロボットメーカのフラッグシップとして対立的に発表された。現時点ではどちらの進め方がよいかは判らない。それぞれ長所短所がある。
双腕ロボットについていえば、長所は「一本のアームでは困難な難組み付け作業がやり易い」ということだろう。2本だけでなく3本以上のアームの協調動作ができれば可能となる組立作業も多いと思われる。一台のロボットが治具を使って組み立てる場合に比べて、治具を簡単化でき生産準備の時間を短縮できる可能性がある。一方、短所は単腕でできる作業も多いので効率が悪いという点がある。双腕型を作らなくても単碗のアームを2台使えば良いという批判もある。
知能ロボットについては、その定義からはじめなくてはならない。ファナックの定義では「視覚または触覚センサを使って、作業対象の位置形状のばらつきに適応して作業を完遂できるロボット」のようだ。長所は作業の停止が起きにくいことだ。短所は作業速度が遅くなること。
多腕知能ロボットがあれば、一番よいことになるが、コストが高すぎる。
当面は作業の特徴にあわせて、これらのロボットを使い分けることになるのではないか。安川電機は双腕ロボットを作業の高速性が要求される自動車の組み付け作業に使おうとしているし、ファナックは知能ロボットを作業が比較的低速でよい部分(バリトリ作業、ワークの取り付け取り外しなど)で使っている。
技術的に難しいのは知能ロボットであろう。物体認識、接触の制御など20年以上にわたる長い研究の歴史があるにもかかわらず、いまだに実用例は少ない。ファナックが実用のラインで導入に成功したことは画期的というべきであろう。敬意を表したい。
産業用ロボットの開発の方向についても、ファナックと安川電機は考えが異なるようだ(朝日新聞2005年12月9日)。安川電機はトヨタ自動車との共同研究で、双腕ロボットの開発を進めている。

双腕ロボット(安川電機2005年)
安川電機のサイト(http://www.yaskawa.co.jp/newsrelease/2005/15.htm)から引用
両腕(各6軸)を装着する胴体に回転1軸を追加する(計13軸)ことで、両手協調による組立作業をやりやすくする。そのために、アームの関節の形態と配分を従来型の産業用ロボットの形態から変えた。手先の水平移動がやり易い構造になった。一方、ファナックは数年前までは双腕ロボットを従来型ロボットアーム2本で構成して機械組み立てをやらせていたが、「システムに柔軟性がなく、制約が多いことがわかって開発を卒業した」とのこと。

双腕ロボット(ファナック2000年)
力センサ、視覚センサなどで、対象物の状態を観察しながら、目的の仕事を完遂する。
http://www.fanuc.co.jp/ja/product/robot/pdf/intelligentrobot.pdfから引用)
視覚センサ(目)や力覚センサ(手)を駆使して、自律的に作業を完遂できる知能化ロボットの開発に重点をおいている。
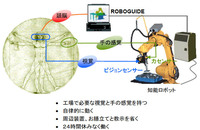
知能ロボットの仕様(ファナック、産業用)
(http://www.fanuc.co.jp/ja/product/robot/pdf/intelligentrobot.pdf から引用)
日本の産業用ロボットメーカでロボット生産額の1位、2位は安川電機とファナックである。この2社のロボット開発でのスタンスは相当異なることが、2005年12月9日の朝日新聞に掲載されていた。大変興味深かった。安川電機はホームロボット(車輪型)の開発、販売をしているが、ファナックは参入の意図はないとのこと。「生産性向上を目的に贅肉をそぎ落とした産業用ロボットは、人間を相手にする際に重要なゆとりや情緒性と相容れない」というのがファナックの見解。
ホンダのアシモが進化した。時速6kmで走る様子がホンダのAsimoサイトに掲載されている。歩行移動機械の完成度がまた高まった。ホンダの開発姿勢は、移動機械を扱う自動車メーカとして自動車だけでなく他の移動機械も研究するということらしい。二足歩行ロボットだけでなく、小型ジェット航空機も開発している。
アシモに関しては、作業ロボットとしてではなく、(当面?は)移動機械としての性能を追求しているように見える。何でもできるロボットを指向するのではなく、2足歩行による移動機械の開発に目標を絞ることにより、実用性の高い商品を実現しようとしているように思える。この方向性は正しいと思える。そのためか、歩行、走行性能の進化のスピードは予想以上に速い。

写真:6km/hで走行中のAsimo(ホンダのAsimoサイトから引用させていただきました)
現在の日本でのホームロボット開発では、ホンダ、ソニー、トヨタといった大企業が本気で取り組むようになった。これらの企業はかって産業用ロボットとその利用技術開発に熱心であった。その生産技術開発者の一部が他の部門の技術者と協力して今度はホームロボットの開発に取り組み始めた。その動きにトリガーをかけたのはホンダであった。95年に二足歩行ロボットを「発表するまでの10年間、ひそかに研究開発を続けていた。10年間に約100億円の開発費を使ったといわれる。
ロボット産業もその生い立ちの時代から未来産業として期待されてきた。しかし、産業用ロボットとしては進化してきたが、それ以外の用途には発展がなかなかできなかった。米国などでホームロボットとしていろいろ商品化されたがほとんどが消えてしまった。日本でも過去に極限作業ロボットの開発が国家プロジェクトとして実施されたことがあったが、実用に至ったものはなかった。実用にするまでの技術がまだまだ未熟であった。日本では最近、ホンダが二足歩行の進歩に大きく貢献したことで、再び、産業界がホームロボットなどの開発に熱心になり始めている。特にコンピュータの高速化やモータ、センサの小型化が産業用ロボット以外の分野、つまり、コンピュータ産業や自動車産業や家電産業で進展し、再びロボットを作ってみようという機運が盛り上がってきた。
現在まで、自動車産業と電機産業が2本柱となって日本を支えてきた。ところが、電機業界の国際競争力が下がっているらしい(エコノミスト12/13,2005)。デジタル家電の新商品がすぐに値崩れしてしまい企業の体力が消耗している。商品の流通機構に問題がありそうだ。
電機産業は過去10年以上にわたって、情報通信分野での未来商品の研究を続けてきた。それらは21世紀の日本を支える技術として、2010年には120兆円の産業に育つことが期待されていた。その結果、いろいろな技術や商品がが生まれてきている。ところが現状はビジネス的には大変苦戦をしているらしい。あたらしい商品を生み出すには苦労はつき物である。われわれコンシューマも厳しいが暖かいユーザとして商品の育成に協力してゆかねばならない。
マルチメディア情報処理が中心技術となるデジタル家電は、その技術が、将来のロボット産業技術と共通する部分が多い。CG、画像処理、ヒューマンインターフェース、通信技術などはマルチメディア分野で開発された技術が役に立つ。日本の電機業界の頑張りに期待したい。たとえば、ソニーの「Cell」コンピュータやそのソフトウェアなどはロボット制御用コンピュータとしても大いに期待できるのではないか。
